Handling of Lorentz 4-vectors in various reference frames. More...
#include "Nc4Vector.h"
Handling of Lorentz 4-vectors in various reference frames.
Definition at line 13 of file Nc4Vector.h.
Public Member Functions | |
| Nc4Vector () | |
| Nc4Vector (const Nc4Vector &v) | |
| virtual | ~Nc4Vector () |
| virtual void | Data (TString f="car", TString u="rad") |
| Double_t | Dot (Nc4Vector &q) |
| Nc3Vector | Get3Vector () const |
| Double_t | GetBeta () |
| Nc3Vector | GetBetaVector () const |
| void | GetErrors (Double_t *v, TString f, TString u="rad") |
| void | GetErrors (Float_t *v, TString f, TString u="rad") |
| Double_t | GetGamma () |
| Double_t | GetInvariant () |
| virtual Double_t | GetOpeningAngle (Nc3Vector &q, TString u="rad") |
| virtual Double_t | GetOpeningAngle (Nc4Vector &q, TString u="rad") |
| Double_t | GetPseudoRapidity () |
| Double_t | GetResultError () const |
| Double_t | GetScalar () |
| Int_t | GetScalarFlag () const |
| NcSignal * | GetUserData () const |
| Nc3Vector | GetVecLong () const |
| void | GetVector (Double_t *v, TString f, TString u="rad") |
| void | GetVector (Float_t *v, TString f, TString u="rad") |
| Nc3Vector | GetVecTrans () const |
| Double_t | GetX (Int_t i, TString f, TString u="rad") |
| Int_t | HasErrors () const |
| Int_t | HasVector () const |
| virtual void | Load (Nc4Vector &q) |
| Nc4Vector | operator* (Double_t s) |
| Nc4Vector & | operator*= (Double_t s) |
| Nc4Vector | operator+ (Nc4Vector &q) |
| Nc4Vector & | operator+= (Nc4Vector &q) |
| Nc4Vector | operator- (Nc4Vector &q) |
| Nc4Vector & | operator-= (Nc4Vector &q) |
| Nc4Vector | operator/ (Double_t s) |
| Nc4Vector & | operator/= (Double_t s) |
| Nc4Vector & | operator= (const Nc4Vector &q) |
| void | Set3Vector (Double_t *v, TString f, TString u="rad") |
| void | Set3Vector (Double_t v1, Double_t v2, Double_t v3, TString f, TString u="rad") |
| void | Set3Vector (Float_t *v, TString f, TString u="rad") |
| void | Set3Vector (Nc3Vector &v) |
| void | SetErrors (Double_t *v, TString f, TString u="rad") |
| void | SetErrors (Double_t e0, Double_t e1, Double_t e2, Double_t e3, TString f, TString u="rad") |
| void | SetErrors (Float_t *v, TString f, TString u="rad") |
| void | SetInvariant (Double_t v2, Double_t dv2=0) |
| void | SetInvariantError (Double_t dv2) |
| void | SetScalar (Double_t v0, Double_t dv0=0) |
| void | SetScalarError (Double_t dv0) |
| void | SetUserData (NcSignal &s) |
| void | SetUserData (NcSignal *s) |
| void | SetVector (Double_t *v, TString f, TString u="rad") |
| void | SetVector (Double_t v0, Double_t v1, Double_t v2, Double_t v3, TString f, TString u="rad") |
| void | SetVector (Double_t v0, Nc3Vector &v) |
| void | SetVector (Float_t *v, TString f, TString u="rad") |
| virtual void | SetZero () |
Protected Member Functions | |
| Double_t | GetScaLong () |
| Double_t | GetScaTrans () |
Protected Attributes | |
| Double32_t | fDresult |
| ! The error on the scalar result of an operation (e.g. dotproduct) | |
| Double32_t | fDv0 |
| Double32_t | fDv2 |
| Int_t | fScalar |
| NcSignal * | fUser |
| Nc3Vector | fV |
| Double32_t | fV0 |
| Double32_t | fV2 |
| Nc4Vector::Nc4Vector | ( | ) |
Definition at line 164 of file Nc4Vector.cxx.
|
virtual |
Definition at line 179 of file Nc4Vector.cxx.
| Nc4Vector::Nc4Vector | ( | const Nc4Vector & | v | ) |
Definition at line 194 of file Nc4Vector.cxx.
|
virtual |
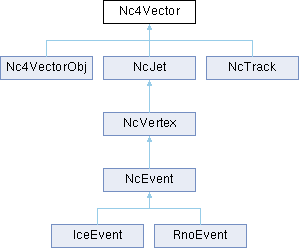
Reimplemented in NcEvent, NcJet, NcTrack, and NcVertex.
Definition at line 881 of file Nc4Vector.cxx.
| Double_t Nc4Vector::Dot | ( | Nc4Vector & | q | ) |
Definition at line 933 of file Nc4Vector.cxx.
| Nc3Vector Nc4Vector::Get3Vector | ( | ) | const |
Definition at line 731 of file Nc4Vector.cxx.
| Double_t Nc4Vector::GetBeta | ( | ) |
Definition at line 1314 of file Nc4Vector.cxx.
| Nc3Vector Nc4Vector::GetBetaVector | ( | ) | const |
Definition at line 1288 of file Nc4Vector.cxx.
| void Nc4Vector::GetErrors | ( | Double_t * | v, |
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 821 of file Nc4Vector.cxx.
| void Nc4Vector::GetErrors | ( | Float_t * | v, |
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 854 of file Nc4Vector.cxx.
| Double_t Nc4Vector::GetGamma | ( | ) |
Definition at line 1328 of file Nc4Vector.cxx.
| Double_t Nc4Vector::GetInvariant | ( | ) |
Definition at line 709 of file Nc4Vector.cxx.
|
virtual |
Definition at line 1411 of file Nc4Vector.cxx.
|
virtual |
Definition at line 1389 of file Nc4Vector.cxx.
| Double_t Nc4Vector::GetPseudoRapidity | ( | ) |
Definition at line 1273 of file Nc4Vector.cxx.
| Double_t Nc4Vector::GetResultError | ( | ) | const |
Definition at line 500 of file Nc4Vector.cxx.
| Double_t Nc4Vector::GetScalar | ( | ) |
Definition at line 443 of file Nc4Vector.cxx.
| Int_t Nc4Vector::GetScalarFlag | ( | ) | const |
Definition at line 1182 of file Nc4Vector.cxx.
|
protected |
Definition at line 1245 of file Nc4Vector.cxx.
|
protected |
Definition at line 1217 of file Nc4Vector.cxx.
| NcSignal * Nc4Vector::GetUserData | ( | ) | const |
Definition at line 1470 of file Nc4Vector.cxx.
| Nc3Vector Nc4Vector::GetVecLong | ( | ) | const |
Definition at line 1205 of file Nc4Vector.cxx.
| void Nc4Vector::GetVector | ( | Double_t * | v, |
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 352 of file Nc4Vector.cxx.
| void Nc4Vector::GetVector | ( | Float_t * | v, |
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 416 of file Nc4Vector.cxx.
| Nc3Vector Nc4Vector::GetVecTrans | ( | ) | const |
Definition at line 1193 of file Nc4Vector.cxx.
| Double_t Nc4Vector::GetX | ( | Int_t | i, |
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 1350 of file Nc4Vector.cxx.
| Int_t Nc4Vector::HasErrors | ( | ) | const |
Definition at line 486 of file Nc4Vector.cxx.
| Int_t Nc4Vector::HasVector | ( | ) | const |
Definition at line 472 of file Nc4Vector.cxx.
|
virtual |
Definition at line 233 of file Nc4Vector.cxx.
| Nc4Vector Nc4Vector::operator* | ( | Double_t | s | ) |
Definition at line 1020 of file Nc4Vector.cxx.
| Nc4Vector & Nc4Vector::operator*= | ( | Double_t | s | ) |
Definition at line 1128 of file Nc4Vector.cxx.
Definition at line 968 of file Nc4Vector.cxx.
Definition at line 1076 of file Nc4Vector.cxx.
Definition at line 994 of file Nc4Vector.cxx.
Definition at line 1102 of file Nc4Vector.cxx.
| Nc4Vector Nc4Vector::operator/ | ( | Double_t | s | ) |
Definition at line 1044 of file Nc4Vector.cxx.
| Nc4Vector & Nc4Vector::operator/= | ( | Double_t | s | ) |
Definition at line 1151 of file Nc4Vector.cxx.
Definition at line 213 of file Nc4Vector.cxx.
| void Nc4Vector::Set3Vector | ( | Double_t * | v, |
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 575 of file Nc4Vector.cxx.
| void Nc4Vector::Set3Vector | ( | Double_t | v1, |
| Double_t | v2, | ||
| Double_t | v3, | ||
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 641 of file Nc4Vector.cxx.
| void Nc4Vector::Set3Vector | ( | Float_t * | v, |
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 614 of file Nc4Vector.cxx.
| void Nc4Vector::Set3Vector | ( | Nc3Vector & | v | ) |
Definition at line 551 of file Nc4Vector.cxx.
| void Nc4Vector::SetErrors | ( | Double_t * | v, |
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 742 of file Nc4Vector.cxx.
| void Nc4Vector::SetErrors | ( | Double_t | e0, |
| Double_t | e1, | ||
| Double_t | e2, | ||
| Double_t | e3, | ||
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 769 of file Nc4Vector.cxx.
| void Nc4Vector::SetErrors | ( | Float_t * | v, |
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 795 of file Nc4Vector.cxx.
| void Nc4Vector::SetInvariant | ( | Double_t | v2, |
| Double_t | dv2 = 0 ) |
Definition at line 670 of file Nc4Vector.cxx.
| void Nc4Vector::SetInvariantError | ( | Double_t | dv2 | ) |
Definition at line 691 of file Nc4Vector.cxx.
| void Nc4Vector::SetScalar | ( | Double_t | v0, |
| Double_t | dv0 = 0 ) |
Definition at line 512 of file Nc4Vector.cxx.
| void Nc4Vector::SetScalarError | ( | Double_t | dv0 | ) |
Definition at line 531 of file Nc4Vector.cxx.
|
inline |
Definition at line 68 of file Nc4Vector.h.
| void Nc4Vector::SetUserData | ( | NcSignal * | s | ) |
Definition at line 1432 of file Nc4Vector.cxx.
| void Nc4Vector::SetVector | ( | Double_t * | v, |
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 292 of file Nc4Vector.cxx.
| void Nc4Vector::SetVector | ( | Double_t | v0, |
| Double_t | v1, | ||
| Double_t | v2, | ||
| Double_t | v3, | ||
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 325 of file Nc4Vector.cxx.
| void Nc4Vector::SetVector | ( | Double_t | v0, |
| Nc3Vector & | v ) |
Definition at line 273 of file Nc4Vector.cxx.
| void Nc4Vector::SetVector | ( | Float_t * | v, |
| TString | f, | ||
| TString | u = "rad" ) |
Definition at line 387 of file Nc4Vector.cxx.
|
virtual |
Definition at line 251 of file Nc4Vector.cxx.
|
protected |
! The error on the scalar result of an operation (e.g. dotproduct)
Definition at line 77 of file Nc4Vector.h.
|
protected |
Definition at line 76 of file Nc4Vector.h.
|
protected |
Definition at line 75 of file Nc4Vector.h.
|
protected |
Definition at line 78 of file Nc4Vector.h.
|
protected |
Definition at line 81 of file Nc4Vector.h.
|
protected |
Definition at line 74 of file Nc4Vector.h.
|
protected |
Definition at line 73 of file Nc4Vector.h.
|
protected |
Definition at line 72 of file Nc4Vector.h.
